专注起重研发生产,集销售、服务、维修为一体的公司
以客户价值为中心,以质量赢市场,以创新促发展,管理以人为本,服务以质为先。
以客户价值为中心,以质量赢市场,以创新促发展,管理以人为本,服务以质为先。

您的位置:新闻中心 >
新闻资讯 / 2025-09-03
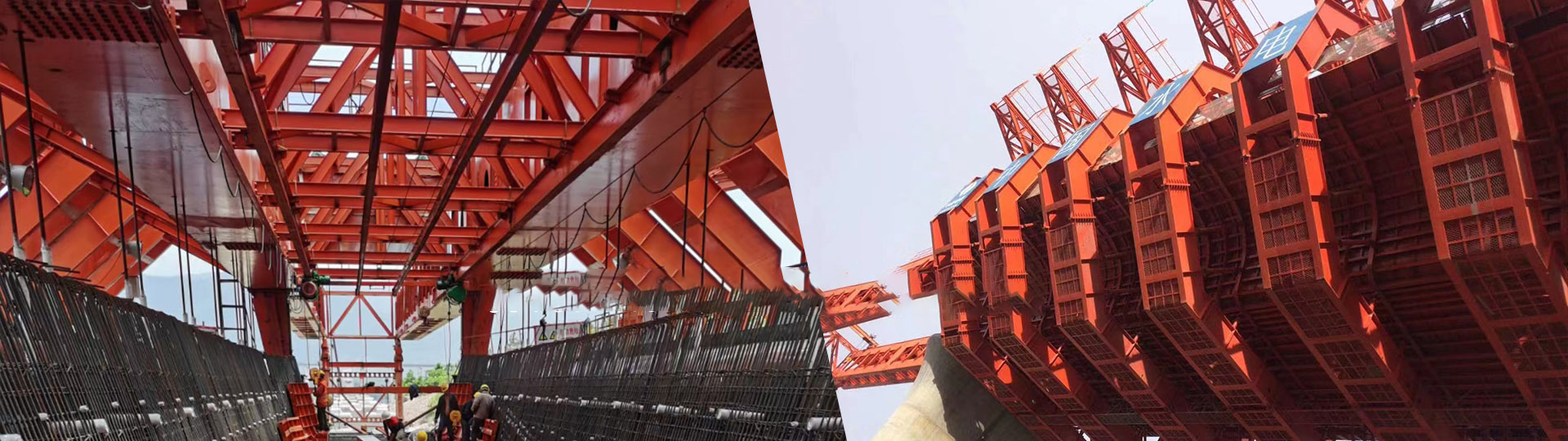
架桥机作为重载高空作业设备,各动作间的互锁逻辑是防止结构干涉、避免安全事故的核心控制手段。依据《架桥机安全规程》(GB 26469 - 2011)和《起重机设计规范》(GB/T 3811 - 2008)要求,必须通过硬件联锁与软件逻辑构建多层级防护体系,实现对起升、横移、走行等关键动作的***管控。

基础安全互锁构成***道防护屏障。舱口门与操作权限的联锁装置是典型代表,当司机室通道门或桥架舱口门开启时,系统立即切断所有机构动力电源,只有门体完全关闭且触发限位开关后,才能解锁操作权限。支腿机构的锁定状态同样是核心互锁条件,PLC 程序持续监测支腿油缸压力传感器和机械锁销位置信号,只有所有支腿完全伸出并达到预设支撑力时,起升和走行机构才能启动,防止因支撑不稳导致的倾覆风险。
核心动作间的制约关系通过程序逻辑严格界定。起升机构与横移、走行机构形成刚性互锁:当吊梁高度未达到安全阈值(通常≥500mm)时,横移和走行机构的控制指令被强制屏蔽。起重小车的纵向运行与横向移动设置优先级逻辑,作业时仅允许单一方向动作,避免复合运动产生的载荷偏移。架桥机的走行动作还受支腿状态制约,三号柱走行轮组未切换至工作位置时,纵移驱动系统无法激活,确保支撑模式与运动状态匹配。
工况模式联锁实现全流程安全管控。架梁状态与过孔状态构成排他性互锁,当架桥机处于过孔作业模式时,起重小车的起升、横移功能被自动锁定,仅保留必要的走行动作权限。运梁车喂梁过程中,三号柱必须切换至宽式支撑状态,通过位置传感器验证后,才能解除运梁车通行限制。架桥机横移调整时,系统实时监测两侧支腿位移差,当偏差超过 30mm 时立即触发减速指令,差值达到 50mm 则强制停机。
特殊场景的互锁设计强化风险防控。紧急停止信号具有***优先级,无论当前执行何种动作,急停按钮触发后所有机构立即制动,且需手动复位才能解除联锁。曲线架梁时,横移机构与机臂摆头动作形成联动互锁,确保两侧支腿同步调整,避免结构承受附加扭矩。通过 “硬件联锁 + 软件逻辑 + 工况验证” 的三重防护,架桥机实现了各动作的有序协同,为重载作业提供了可靠的安全保障。
 扫一扫 关注我们的微信
扫一扫 关注我们的微信张经理
河南省商丘市民权县庄子镇逍遥社区90号
河南鹏跃起重机有限公司 网站地图